Cercetătorii de la Institutul de Tehnologie din Massachusetts au făcut pași semnificativi spre crearea roboților care pot asambla în mod fezabil și economic aproape orice, inclusiv lucruri mult mai mari decât ei înșiși, de la vehicule la clădiri la roboți și mai mari.
Noua lucrare, de la Centrul pentru Biți și Atomi (CBA) al MIT, se bazează pe ani de cercetare, inclusiv studii recente care arată că obiecte precum aripa deformabilă a unui avion și o mașină de curse funcțională pot fi asamblate din piese identice mici și ușoare – și că Hardware-ul robotizat poate fi fabricat pentru a efectua unele dintre aceste lucrări de compilare. Acum, echipa a arătat că atât roboții de asamblare, cât și componentele structurii care se construiesc pot fi toate fabricate din aceleași subunități, iar roboții se pot deplasa independent în număr mare pentru a realiza rapid ansambluri la scară largă.
Noua lucrare este raportată în jurnal Ingineria comunicațiilor naturiiîntr-o lucrare scrisă de studenta doctorandă CBA Amira Abdelrahman, profesor și director CBA Neil Gershenfeld și alți trei.
Un sistem de asamblare robot cu auto-replicare complet autonom, capabil să asambla structuri mai mari, inclusiv roboți și mai mari și să planifice cea mai bună secvență de construcție, spune Gershenfeld, este încă la câțiva ani distanță. Dar noua lucrare face pași importanți către acest obiectiv, inclusiv rezolvarea sarcinilor complexe de când și cât de mari să construiască mai mulți roboți, precum și cum să organizeze roiuri de roboți de diferite dimensiuni pentru a construi o structură eficient, fără a se ciocni. reciproc.
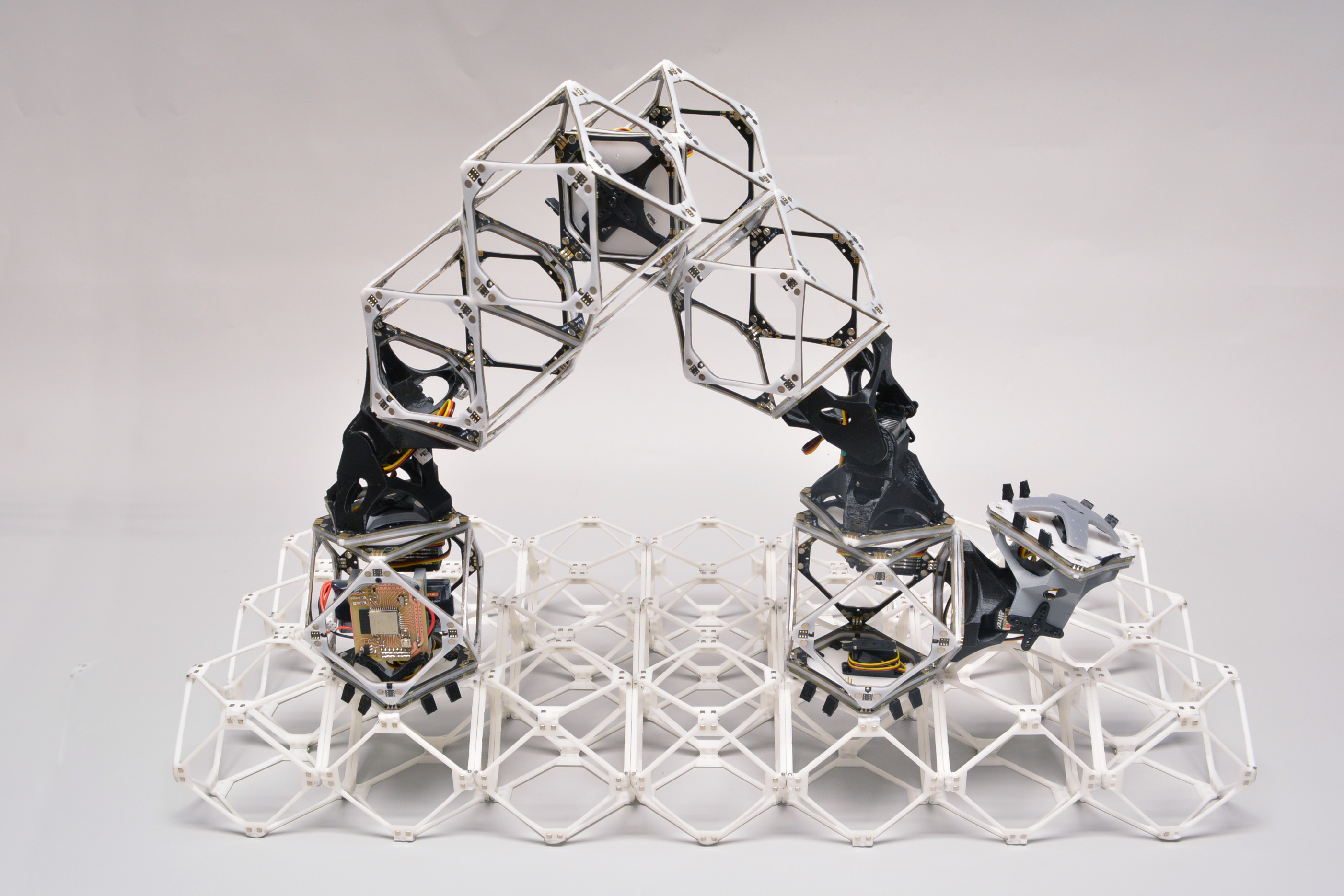
Ca și în experimentele anterioare, noul sistem include structuri mari, utilizabile, construite dintr-un set de subunități exact identice numite voxeli (echivalentul volumetric al unui pixel 2D). Dar, în timp ce pixelii anteriori erau piese scheletice pur mecanice, acum echipa a dezvoltat voxeli complexe care pot transmite fiecare putere și date de la o unitate la alta. Acest lucru poate duce la construirea de structuri care nu numai să reziste la sarcini, ci și să efectueze lucrări, cum ar fi ridicarea, mutarea și manipularea materialelor – inclusiv pixelii înșiși.
„Când construim aceste structuri, trebuie să construim inteligență”, spune Gershenfeld. În timp ce versiunile anterioare ale roboților colectori erau conectate prin mănunchiuri de fire la sistemele lor de alimentare și de control, „ceea ce a apărut a fost ideea electronicii structurale – de a realiza voxeli care transmit putere și date, precum și putere”. El arată către noul sistem în acțiune: „Nu există fire. Există doar șasiul”.
Boții înșiși constau dintr-o serie de mulți pixeli conectați cap la cap. Acestea pot prinde un alt voxel folosind puncte de atașare la un capăt și apoi se pot deplasa ca un vierme în poziția dorită, unde voxelul poate fi atașat de structura în creștere și eliberat acolo.
Gershenfeld afirmă că, în timp ce sistemul anterior demonstrat de membrii grupului său ar putea, în principiu, să construiască structuri arbitrar de mari, întrucât dimensiunea acestor structuri a atins un anumit punct în raport cu dimensiunea robotului asamblat, procesul ar deveni din ce în ce mai ineficient datorită căi mai lungi pe care fiecare le-ar avea la Un robot de tăiere pentru a aduce fiecare piesă la destinație. În acel moment, cu noul sistem, roboții pot decide că este timpul să construiască o versiune mai mare a lor, care să poată parcurge distanțe mai mari și să reducă timpul de călătorie. O structură mai mare poate necesita un alt astfel de pas, noii roboți mai mari creând alții mai mari, în timp ce părțile unei structuri cu multe detalii fine pot necesita mai mult de la roboții mai mici.
Abdur-Rahman spune că, în timp ce acești roboți asamblează ceva, ei se confruntă cu alegeri la fiecare pas de-a lungul drumului: „Pot construi o structură, pot construi un alt robot de aceeași dimensiune sau pot construi un robot mai mare”. munca pe care s-a concentrat pe cercetătorii IT creează algoritmi pentru a lua o astfel de decizie.
„De exemplu, dacă doriți să construiți un con sau o emisferă”, spune ea, „cum începeți să planificați traseul și cum împărțiți acea formă” în diferite zone pe care pot lucra diferiți roboți? Software-ul dezvoltat de ei permite cuiva să introducă o formă și să obțină o ieșire care arată unde să plaseze primul bloc și fiecare după aceea, în funcție de distanțele de parcurs.
Gershenfeld spune că sunt publicate mii de lucrări despre planificarea rutelor pentru roboți. „Dar pasul de după aceea, robotul trebuie să ia decizia de a construi un alt robot sau un alt tip de robot – asta este nou. Nu există nimic înainte de asta.”
În timp ce sistemul experimental poate efectua agregare și include legături de putere și date, în versiunile actuale conectorii dintre subunitățile mici nu sunt suficient de robusti pentru a suporta sarcinile necesare. Echipa, inclusiv studenta absolventă Myanna Smith, se concentrează acum pe dezvoltarea unor dirijori mai puternici. „Acești roboți pot merge și pot plasa piese”, spune Gershenfeld, „dar suntem aproape – dar nu chiar – punctul în care unul dintre acești roboți face un alt robot și pleacă. Și asta se reduce la reglarea fină a lucrurilor, precum puterea dispozitivelor de acționare și rezistența articulațiilor… Dar cât de lungă încât acestea să fie părțile care vor duce la asta.”
În cele din urmă, aceste sisteme pot fi folosite pentru a construi o varietate de structuri mari, de mare valoare. De exemplu, modul în care sunt construite avioanele în prezent implică fabrici uriașe cu poduri mult mai mari decât componentele care le fac, iar apoi „când faci un avion jumbo, ai nevoie de avioane jumbo pentru a transporta piese din avionul jumbo pentru a le face”. spune Gershenfeld. Cu un sistem ca acesta construit din componente minuscule puse împreună de roboți minusculi, „ansamblul final al aeronavei este singurul ansamblu”.
De asemenea, atunci când produceți o mașină nouă, „puteți petrece un an pe scule” înainte ca prima mașină să fie construită efectiv, spune el. Noul sistem va ocoli întregul proces. Aceste potențiale eficiențe sunt motivul pentru care Gershenfeld și studenții săi lucrează îndeaproape cu companiile auto, companiile aeriene și NASA. Dar chiar și industria construcțiilor de clădiri cu tehnologie relativ scăzută poate beneficia și ea.
Deși a existat un interes sporit pentru casele tipărite 3D, astăzi acele case necesită mașini de imprimare de dimensiunea sau mai mare decât casa construită. Din nou, posibilitatea ca astfel de structuri să fie în schimb asamblate de roiuri de roboți minusculi ar putea oferi beneficii. DARPA este, de asemenea, interesată să lucreze la posibilitatea de a construi structuri pentru a proteja coastele de eroziune și creșterea nivelului mării.
Aaron Baker, profesor asociat de inginerie electrică și informatică la Universitatea din Houston, care nu a fost asociat cu această cercetare, descrie lucrarea ca „un home run – [offering] Un sistem hardware inovator, un nou mod de a gândi despre scalarea roiului și algoritmi riguroși. „
Becker adaugă: „Această lucrare abordează o zonă importantă a sistemelor reconfigurabile: cum să extindeți rapid o forță de muncă robotizată și să o utilizați pentru a asambla eficient materialele în structura dorită. … Aceasta este prima lucrare pe care am văzut-o care atacă problema dintr-o perspectivă cu totul nouă – folosind un set inițial de piese de robot pentru a construi un lot de roboți ale căror dimensiuni au fost optimizate pentru a construi structura necesară (și alți roboți) cât mai repede posibil.”
Echipa de cercetare a inclus, de asemenea, studentul MIT-CBA Benjamin Genet și Christopher Cameron, care lucrează acum la Laboratorul de Cercetare al Armatei SUA. Lucrarea a fost susținută de NASA, Laboratorul de Cercetare al Armatei SUA și finanțare de la consorțiile CBA.

„Student. Organizator subtil fermecător. Susținător al muzicii certificat. Scriitor. Făcător de-a lungul vieții. Iubitor de Twitter.”




More Stories
Criza climatică amenință ecosistemele alpine
Invazia peștilor tropicali amenință apele australiene
Google lansează două noi resurse gratuite pentru a vă ajuta să vă îmbunătățiți afirmațiile AI